3.3. Siła Lorentza i wektor indukcji pola magnetycznego
W tym podrozdziale określimy wektor indukcji pola magnetycznego mówiący nam, jak silne jest pole. Wektor ten odgrywa w magnetyzmie rolę podobną do wektora natężenia pola elektrycznego w elektrostatyce. Ze względów historycznych nie nazywa się wektorem natężenia pola magnetycznego, lecz wektorem jego indukcji. Tej różnicy w nazwie nie należy jednak przypisywać żadnych różnic w interpretacji. Wektor określimy za pomocą siły Lorentza – siły działania pola magnetycznego na ruchomy ładunek elektryczny.
Omawiane powyżej linie pola magnetycznego są liniami, wzdłuż których na małe dipole magnetyczne (np. opiłki żelaza lub igły magnetyczne kompasu) działają siły. Te dipole odgrywają rolę podobną do ładunków próbnych w polu elektrycznym albo – w przypadku pola grawitacyjnego – do masy próbnej. Jak już wspomnieliśmy, nie ma pojedynczych biegunów magnetycznych, jednakże pole magnetyczne może działać na pojedyncze ładunki elektryczne będące w ruchu. Z góry możemy się spodziewać, że to oddziaływanie będzie inne niż oddziaływanie na dipole magnetyczne.

Wykonajmy doświadczenie z ruchem elektronów w polu magnetycznym. Strumień elektronów możemy obserwować w tzw. rurce katodowej, skonstruowanej w następujący sposób (il. 3.12): W opróżnionej z powietrza bańce szklanej zatopione są dwie elektrody, katoda i anoda, do których przykładamy wysokie napięcie. Z katody wylatują elektrony, które są następnie przyciągane do anody . Elektrony na swojej drodze napotykają szczelinę , która przepuszcza je wąskim strumieniem. Strumień elektronów jest następnie uwidaczniany dzięki pionowej płytce pokrytej materiałem fluorescencyjnym podobnym do tego, którego używa się do produkcji ekranów telewizorów kineskopowych. Płytka nie jest umieszczona prostopadle do płaszczyzny szczeliny, lecz jest minimalnie pochylona. Dzięki temu elektrony, uderzając w płytkę, powodują jej świecenie i zostawiają jasną smugę obrazującą tor całej wiązki.
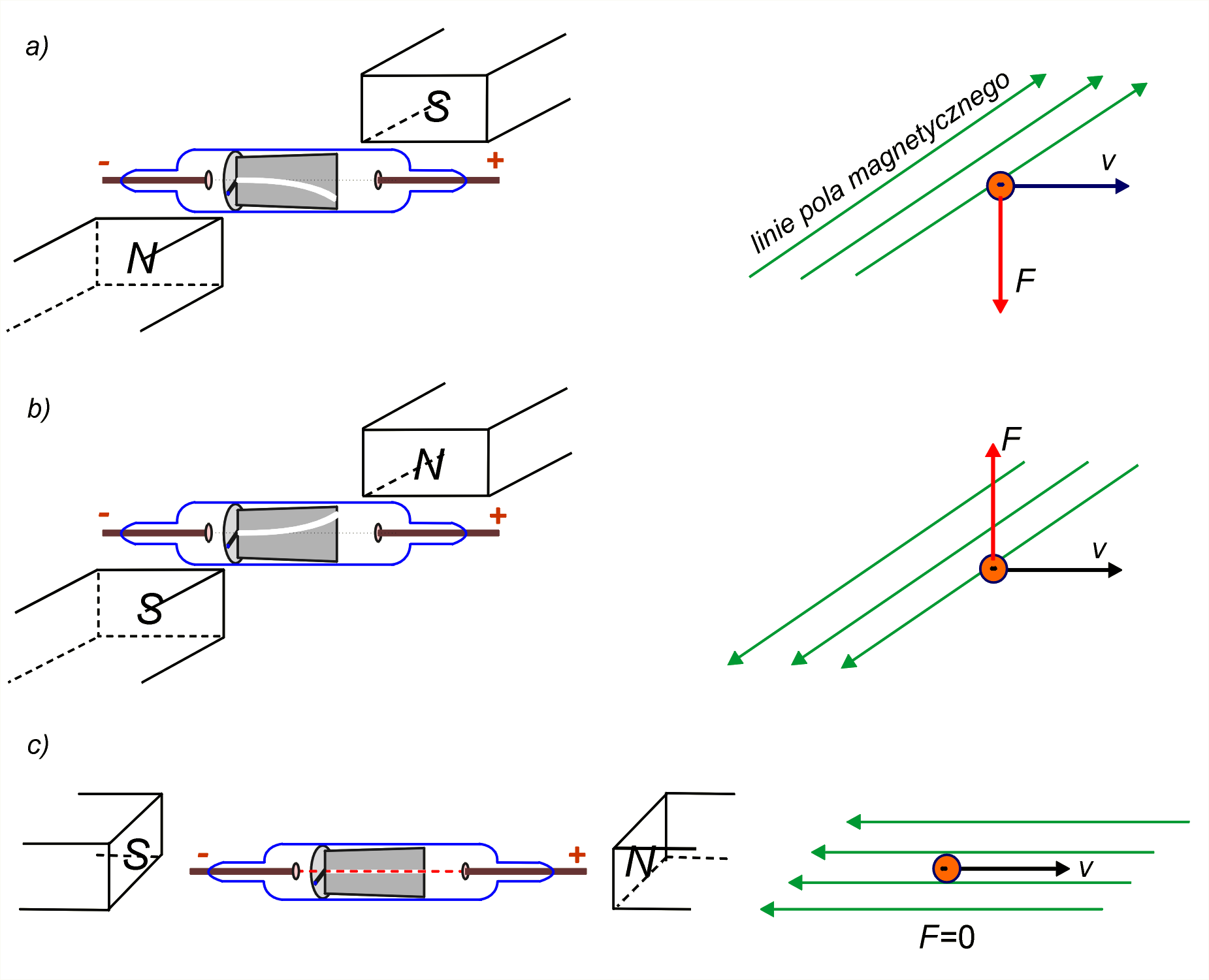
Umieśćmy rurkę katodową w polu magnetycznym tak, aby strumień elektronów był prostopadły do linii pola. Zaobserwujemy odchylenie strumienia elektronów, jak na il. 3.13. Wnioskujemy, że siła działania pola magnetycznego na ruchome ładunki (tutaj elektrony) jest prostopadła zarówno do linii pola magnetycznego, jak i do wektora prędkości ładunków. Zwrot tej siły zależy od zwrotu linii pola magnetycznego (il. 3.13a i b). Na il. 3.13c przedstawiono sytuację, gdy linie pola magnetycznego są równoległe do wektora prędkości ładunków – w tym wypadku siła na ładunki nie działa, jest ona równa zeru. Siła ta powinna działać tak samo, niezależnie od tego, czy pole magnetyczne zostało wytworzone przez magnes trwały, czy przez prąd elektryczny w przewodniku.
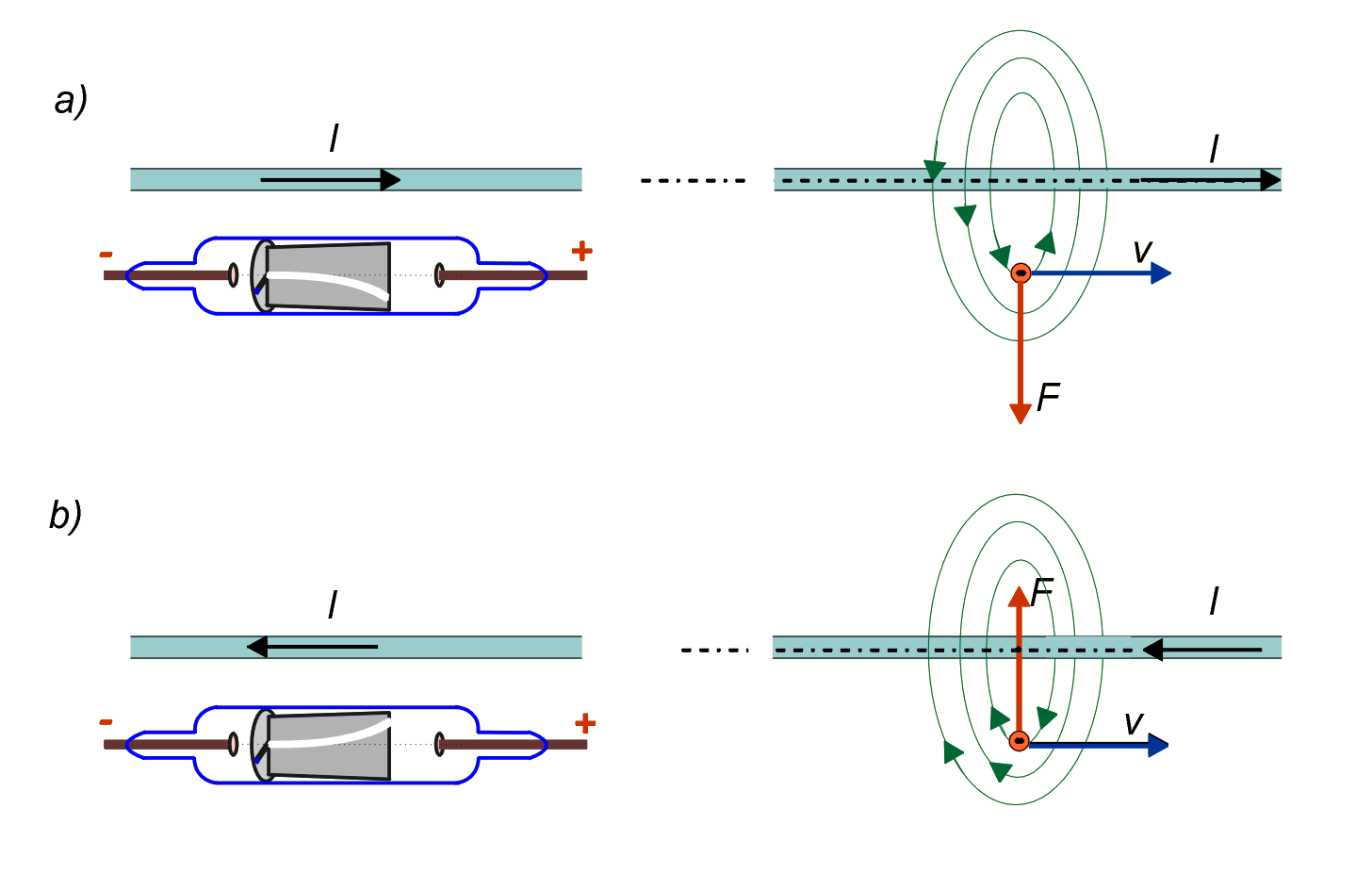
Sprawdźmy nasz wniosek: Umieśćmy rurkę katodową w polu magnetycznym prostoliniowego przewodnika z prądem. Przewodnik ustawmy równolegle do strumienia elektronów. Wtedy linie pola magnetycznego będą prostopadłe do wektora prędkości elektronów (il. 3.14), podobnie jak w omówionych wcześniej przypadkach magnesu trwałego. Tak jak poprzednio, siła jest prostopadła zarówno do wektora prędkości elektronów, jak i do linii pola magnetycznego. Również zwrot siły jest taki sam.
Na podstawie wielu doświadczeń stwierdzono, że wartość siły działającej na ładunek , który porusza się z prędkością składową w kierunku prostopadłym do linii danego pola magnetycznego, jest proporcjonalna do iloczynu :
Oczywiście, ten sam ładunek , poruszający się z taką samą prędkością prostopadle do linii pola w innym polu magnetycznym, dozna działania siły o innej wartości.
Wartość siły magnetycznej działającej na jednostkę iloczynu , informuje nas, jak „silne” jest pole magnetyczne. Nazywamy ją wartością wektora indukcji pola magnetycznego (podobnie zdefiniowaliśmy wartość natężenia pola elektrycznego – jako wartość siły elektrycznej działającej na jednostkowy ładunek próbny w danym punkcie pola). Przyjmujemy zatem dla pola magnetycznego:
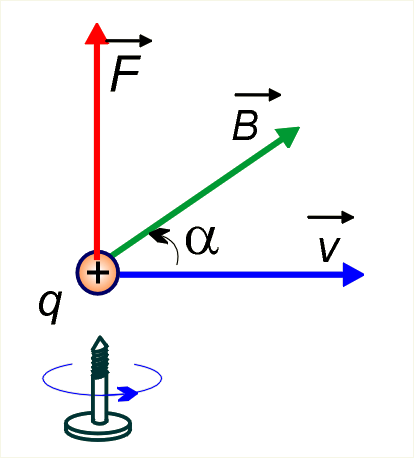
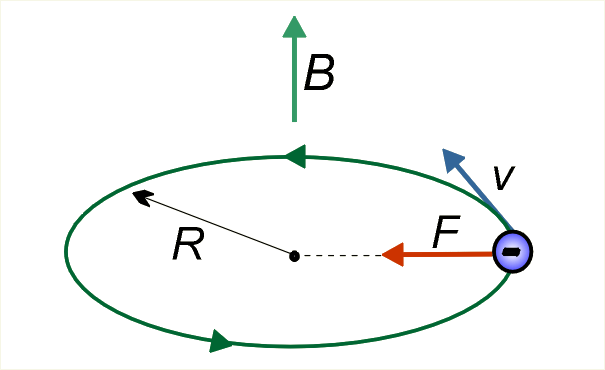
gdzie oznacza wartość prędkości składowej w kierunku prostopadłym do linii pola. Wektor w danym punkcie pola ma kierunek i zwrot zgodny z linią pola magnetycznego. Zwrot siły jest określony regułą śruby prawoskrętnej: jeśli wektor obrócimy w kierunku wektora jak na ilustracji il. 3.15, to wyobrażona śruba prawoskrętna podążająca za tym obrotem wskaże kierunek i zwrot wektora . Taki zwrot siły otrzymamy, gdy ładunek jest dodatni. W przypadku ładunku ujemnego zwrot siły pochodzącej od pola magnetycznego jest przeciwny (np. elektronu – il. 3.13 i il. 3.14).
Jednostką indukcji pola magnetycznego jest tesla (1 T). Ze wzoru (3.2) wynika, że .
Warto zwrócić uwagę, że jest to dość duża jednostka. Ziemskie pole magnetyczne ma indukcję rzędu , typowe magnesy sztabkowe wytwarzają w pobliżu biegunów pole o indukcji rzędu kilku lub kilkudziesięciu mT. Indukcja najsilniejszych pól magnetycznych, które potrafimy wytworzyć w laboratoriach, osiąga wartość do .
W następnym podrozdziale nauczymy się obliczać indukcję magnetyczną na podstawie wywołujących ją prądów.
Wzór (3.2) pozwala na zapisanie siły pochodzącej od pola magnetycznego, gdy prędkość ładunku jest prostopadła do wektora , następująco:
Gdy prędkość jest skierowana do wektora indukcji pod kątem , wektor prędkości można rozłożyć na dwie składowe: poprzeczną (prostopadłą) i podłużną (równoległą) . Jak widzieliśmy (il. 3.13c), siła pochodząca od pola magnetycznego przy ruchu z prędkością podłużną jest równa zeru. Zatem w wypadku ruchu ładunku w dowolnym kierunku siła pochodząca od pola magnetycznego zależy tylko od składowej poprzecznej prędkości:
Wzór (3.4) wyraża wartość siły pochodzącej od pola magnetycznego w ogólnym przypadku. Nosi ona nazwę siły Lorentza.
Siłę Lorentza można wyrazić za pomocą iloczynu wektorowego:
Jeżeli ładunek porusza się w polu magnetycznym i elektrycznym, to działają na niego dwie siły: siła pochodząca od pola magnetycznego i siła pochodząca od pola elektrycznego . Wówczas:
Jest to wzór na tzw. uogólnioną siłę Lorentza.
Jednym ze skutków działania siły Lorentza jest tzw. zjawisko Halla. Możesz się z nim zapoznać, wykonując ćwiczenie wirtualne.
Przykład 1
Wiązka elektronów wlatuje w obszar jednorodnego pola magnetycznego o indukcji prostopadle do jego linii. Elektrony zostały uprzednio rozpędzone polem elektrycznym, w którym przeszły różnicę potencjałów . Uzasadnij, że w polu elektrony będą poruszały się po okręgu i oblicz promień tego okręgu. Jaki będzie okres obiegu elektronu po okręgu? Jaką pracę wykona pole magnetyczne działające na elektrony podczas jednego pełnego obiegu? Wiemy, że ładunek elektronu , a jego masa .
Rozwiązanie: Najpierw obliczymy prędkość elektronów, jaką uzyskały po przebyciu różnicy potencjałów . Dzięki pracy pola elektrycznego elektrony nabywają energię kinetyczną , zatem:
Stąd
Na elektrony poruszające się w polu magnetycznym prostopadle do jego linii działa tylko siła Lorentza . Siła ta jest zawsze prostopadła do wektora prędkości, zatem jest ona siłą dośrodkową i powoduje ruch po okręgu (lub po jego fragmencie) bez zmiany wartości prędkości elektronów. Zachodzi przy tym równość:
Widzimy, że w wyniku działania siły Lorentza elektrony poruszają się po łuku o promieniu krzywizny . W przypadku pola jednorodnego będzie to ruch po okręgu (il. 3.17), którego promień:
Korzystając z zależności (3.8), otrzymamy:
Po podstawieniu danych otrzymamy .
Obliczmy teraz okres obiegu elektronów po okręgu. Znamy wzór , skąd . Korzystając ze wzoru (3.10), otrzymujemy:
Zauważmy, że w polu magnetycznym okres obiegu elektronów po okręgu nie zależy od ich prędkości ani od promienia okręgu. Po podstawieniu danych otrzymamy .
Odpowiedzmy jeszcze na ostatnie pytanie – siła pochodząca od pola magnetycznego nie wykonuje pracy, ponieważ jest prostopadła do przemieszczenia ładunku.
Przykład 2
Na il. 3.18 przedstawiono schemat typowego spektrometru masowego, służącego do pomiaru masy izotopów określonych pierwiastków. Izotopy to atomy o różnych masach, ale takich samych własnościach chemicznych. Wynika to stąd, że atomy te różnią się tylko liczbą neutronów w swoich jądrach, nie różnią się natomiast ani liczbą protonów, ani otoczkami elektronowymi.
Zasada działania spektrometru masowego jest następująca: źródło zawiera dodatnie jony izotopów w stanie gazowym, które są następnie przyspieszane w polu elektrycznym o napięciu . Jony z prędkością wlatują w obszar poprzecznego pola magnetycznego (wektor jest ustawiony prostopadle do płaszczyzny rysunku i jest zwrócony w stronę czytelnika). Na skutek działania siły Lorentza ich tory są zakrzywiane. Promień zakreślanego łuku można obliczyć za pomocą wzoru (3.11), który dla jonu o masie i ładunku ma postać:
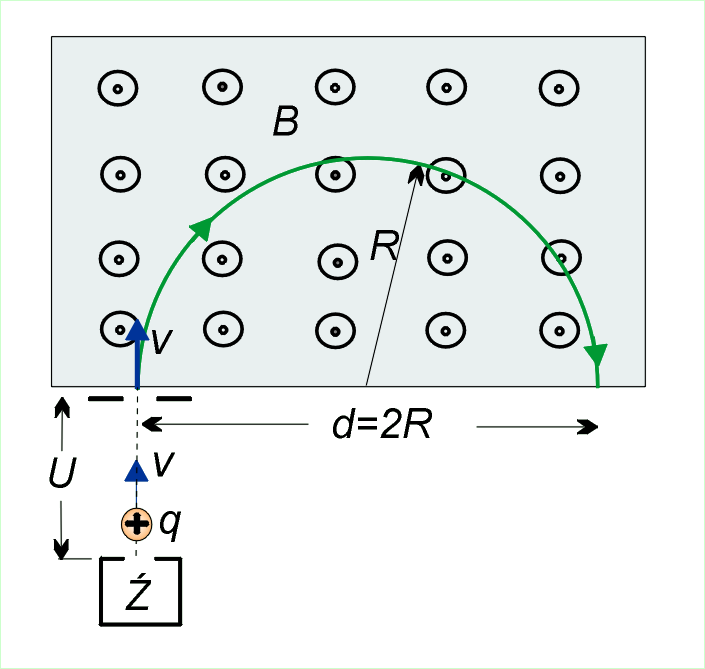
Promień można łatwo wyznaczyć, mierząc . Zatem z zależności (3.13) można otrzymać masę danego izotopu. Po przekształceniu wzoru (3.13) otrzymujemy:
Przykład 3
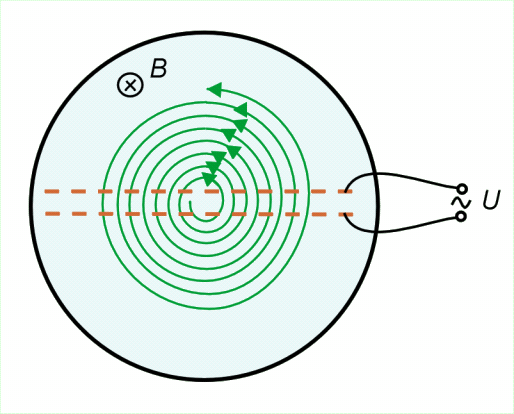
Zadaniem akceleratora jest przyspieszanie cząstek do dużych prędkości. Cząstki naładowane można przyspieszać w polu elektrycznym o dużym natężeniu. Jednakże zwiększanie natężenia pola elektrycznego ma swoje granice. Ale cząstki można zmusić do wielokrotnego przejścia przez pole elektryczne, jeżeli będziemy zawracać je za pomocą poprzecznego pola magnetycznego. Omawiając ruch elektronów w poprzecznym polu magnetycznym, zauważyliśmy, że okres obiegu po okręgu nie zależy od ich prędkości ani od promienia okręgu (patrz wzór (3.12)). Ta własność została wykorzystana w budowie akceleratora, tzw. cyklotronu. Na il. 3.19 przedstawiono schemat jego działania. Cząstki, np. elektrony, są wprowadzane do cyklotronu w pobliżu środka koła. Po wejściu w obszar pola elektrycznego między elektrodami o napięciu umieszczonymi wzdłuż średnicy, są przyśpieszane. Następnie jednorodne pole magnetyczne zakrzywia ich tor. Elektrony zawracają i po wykonaniu półokręgu, po czasie , trafiają znowu w obszar pola elektrycznego, które w tym czasie zmieniło swój zwrot. Dzięki temu elektrony są znowu przyśpieszane. Za każdym razem elektrony, zwiększając swoją prędkość, zwiększają promień zataczanego półokręgu. Nie wpływa to na ich okres obiegu , dlatego ruch elektronów może być zsynchronizowany z periodycznymi zmianami .
Podczas stosowania cyklotronu następuje jednak ograniczenie energii przyspieszanych cząstek wynikające z:
1) ograniczonego obszaru jednorodnego pola magnetycznego (elektron, zwiększając swoją energię, zwiększa promień orbity i dochodzi do granicy geometrycznej cyklotronu),
2) relatywistycznego ograniczenia prędkości elektronu (która nie może przekroczyć prędkości światła).
Efekty relatywistyczne sprawiają, że okres obiegu wydłuża się i elektron spóźnia się na kolejne cykliczne zmiany zwrotu pola elektrycznego. Następuje desynchronizacja cyklotronu i cząstki nie są w stanie zwiększać w dalej swojej energii. Największy cyklotron nadawał cząstkom energię kilkunastu megaelektronowoltów. Dzisiaj cyklotrony tego typu nie są już stosowane.

Największe energie cząstek uzyskiwane w synchrocyklotronie osiągnęły wartość około 700 MeV. Teoretycznie, zasada synchrocyklotronu pozwala uzyskiwać dowolnie dużą energię. Jednakże budowa tego typu urządzeń jest bardzo kosztowna. Najdroższy jest olbrzymi elektromagnes, który wytwarza jednorodne pole magnetyczne w dużym obszarze obejmującym zarówno cząstki, które dopiero co zaczynają nabierać prędkości, jak i te, które mają prędkości zbliżone do prędkości światła. Dlatego też w budowanych dzisiaj akceleratorach przeznaczonych do nadawania cząstkom energii rzędu setek GeV i więcej cząstki krążą po stałych orbitach. W takich akceleratorach elektromagnesy (chłodzone ciekłym helem o temperaturze 4,2 K) rozmieszczone są tylko na pierścieniu obejmującym orbitę cząstek wcześniej wstępnie przyspieszonych. Średnica takiego pierścienia wynosi kilka kilometrów.
Pytania i problemy
- Przedstaw równanie opisujące zależność między siłą działającą na cząstkę naładowaną poruszającą się w polu magnetycznym i indukcją magnetyczną.
- Na cząstkę naładowaną poruszającą się w polu magnetycznym działa siła Lorentza . Które z trzech wektorów , i są zawsze parami prostopadłe, a które mogą być skierowane wzajemnie pod dowolnym kątem?
- Przedstaw rozumowanie prowadzące do zdefiniowania wektora indukcji pola magnetycznego. Jaka wielkość odgrywa przy tym rolę analogiczną do ładunku elektrycznego w elektrostatyce?
- Wykaż, że .
- Wykaż, że iloraz jednostek pól elektrycznego i magnetycznego daje w wyniku jednostki prędkości: .
- Jeżeli ładunek porusza się ruchem prostoliniowym bez odchylenia swego toru, to czy można być pewnym, że w tej przestrzeni nie ma pola magnetycznego? Podaj uzasadnienie odpowiedzi.
- Obserwujemy, że strumień elektronów odchyla się w bok od prostoliniowego toru. Czy można wnioskować, że odchylenie następuje na skutek działania: a) pola elektrycznego, b) pola magnetycznego?
- Dlaczego w celu rozdzielenia izotopów posługujemy się spektrometrem masowym wykorzystującym pole magnetyczne, a nie robimy tego na drodze chemicznej?
- Wiemy, że siła działająca na naładowaną cząstkę jest prostopadła do jej prędkości, zatem nie może wykonywać pracy, czyli pole magnetyczne nie może przyśpieszać cząstek. Wyjaśnij, dlaczego więc stosuje się je w akceleratorach, np. w cyklotronie?
- Wiązkę dodatnich jonów o masie
i ładunku
przyspieszono napięciem
. Jednak wskutek przypadkowych procesów nie wszystkie uzyskały
dokładnie prędkość
, przewidzianą wzorem (3.8).
W celu wyeliminowania tych jonów, których prędkości odbiegają od wzorcowej,
wiązkę taką przepuszczono przez obszar, w którym występuje pole elektryczne
i magnetyczne
o kierunkach zaznaczonych na il. 3.21 i natężeniach tak dobranych, że jony o prędkości
przechodzą przez ten obszar ruchem prostoliniowym. Określ zwrot pola
i wyraź jego natężenie jako funkcję
,
oraz
i
.
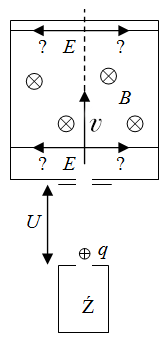 Ilustracja 3.21. Przyspieszone jony przelatują prostoliniowo z prędkością przez obszar skrzyżowanych pól iJak już wspominano, kółko z krzyżykiem w środku oznacza, że wektory pola są prostopadłe do rysunku i mają zwrot „od patrzącego, za rysunek”
Ilustracja 3.21. Przyspieszone jony przelatują prostoliniowo z prędkością przez obszar skrzyżowanych pól iJak już wspominano, kółko z krzyżykiem w środku oznacza, że wektory pola są prostopadłe do rysunku i mają zwrot „od patrzącego, za rysunek”